上海四宏電機(jī)有限公司主營產(chǎn)品:低壓伺服電機(jī)、交流伺服電機(jī)、步進(jìn)電機(jī)、無刷電機(jī)以及配套驅(qū)動(dòng)器。
南方大區(qū):13482896782
北方大區(qū):18017377875
廣東大區(qū):13061929082
北方大區(qū):18017377875
廣東大區(qū):13061929082
長久以來,很多人找不到步進(jìn)控制存在的問題,而把一切歸罪于反饋脈沖受到干擾;其實(shí)一個(gè)方波的周期T由低速到高速變化了上百倍、上千倍,那還是方波嗎?加上很多編碼器的實(shí)際刻線只有三、四百,用分、倍頻的電路將其擴(kuò)大,在步進(jìn)速度變化劇烈時(shí),嚴(yán)重失真。
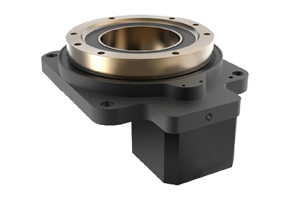
步進(jìn)電機(jī),步進(jìn)電動(dòng)機(jī)又稱執(zhí)行電動(dòng)機(jī),在自動(dòng)控制系統(tǒng)中,用作執(zhí)行元件,把所收到的電信號(hào)轉(zhuǎn)換成電動(dòng)機(jī)軸上的角位移或角速度輸出。分為直流和交流步進(jìn)電動(dòng)機(jī)兩大類
步進(jìn)系統(tǒng)最初用于船舶的自動(dòng)駕駛、火炮控制和指揮儀中,后來逐漸推廣到很多領(lǐng)域,特別是自動(dòng)車床、天線位置控制、導(dǎo)彈和飛船的制導(dǎo)等。采用步進(jìn)系統(tǒng)主要是為了達(dá)到下面幾個(gè)目的:①以小功率指令信號(hào)去控制大功率負(fù)載。
火炮控制和船舵控制就是典型的例子。②在沒有機(jī)械連接的情況下,由輸入軸控制位于遠(yuǎn)處的輸出軸,實(shí)現(xiàn)遠(yuǎn)距同步傳動(dòng)。③使輸出機(jī)械位移精確地跟蹤電信號(hào),如記錄和指示儀表等。
步進(jìn)的問題,絕不是“干擾”的問題;如果停車指令是準(zhǔn)確的,不能準(zhǔn)確停車的原因是運(yùn)動(dòng)體總存在慣性。
當(dāng)電機(jī)速度高、低變化時(shí),反饋脈沖的頻率和波形會(huì)發(fā)生劇烈的變化,這給反饋脈沖的整形、計(jì)數(shù)、分倍頻帶來很大的困難,甚至完全失態(tài)。
步進(jìn)停車指令不準(zhǔn)確的原因,也絕不是干擾的問題:編碼器輸出的反饋脈沖波形和頻率,因步進(jìn)電機(jī)的速度不同而不同,反饋脈沖的頻率。步進(jìn)步進(jìn)電機(jī)編碼器反饋脈沖的頻率=編碼器解析度×步進(jìn)電機(jī)轉(zhuǎn)速(r/s)。