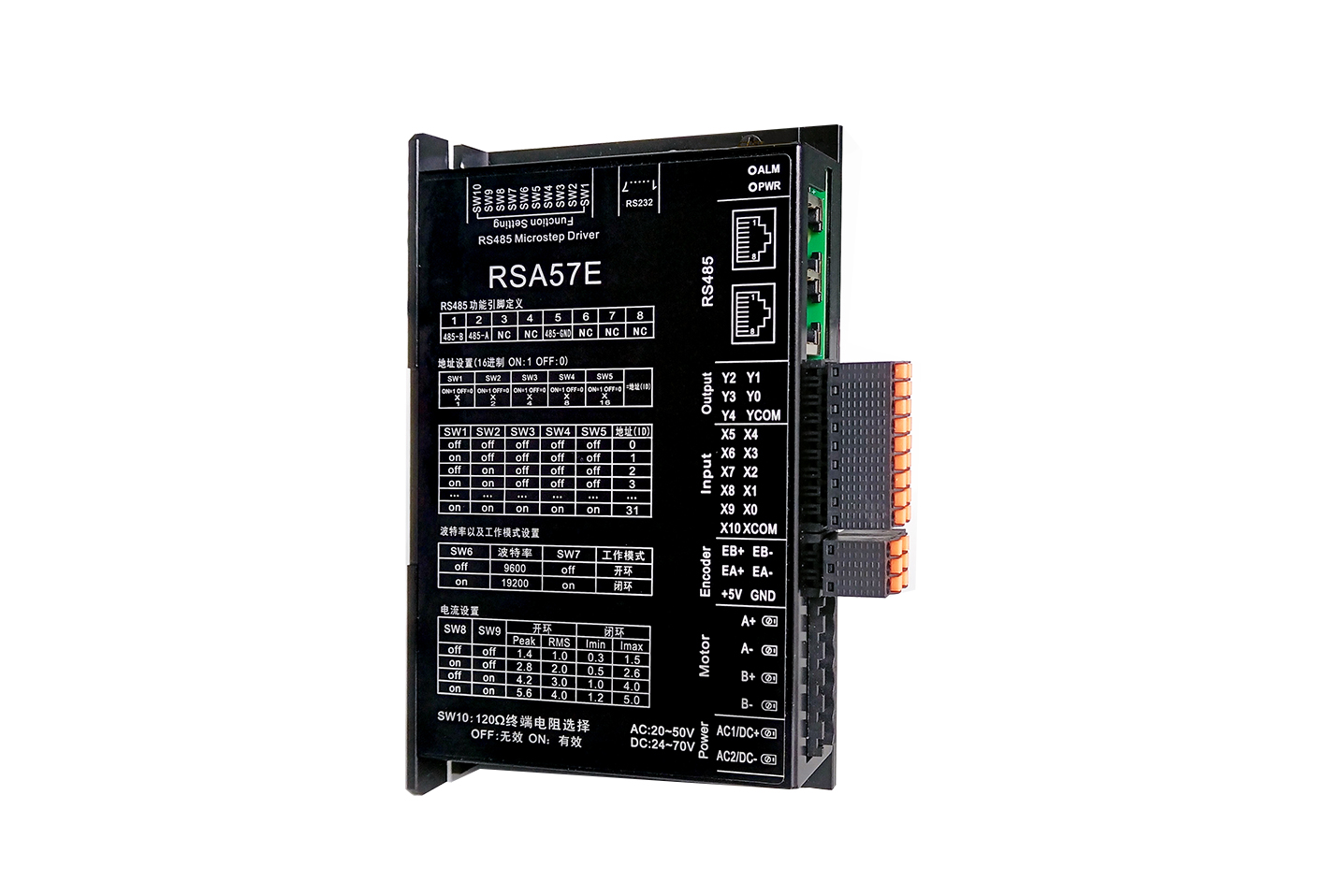
上海四宏電機有限公司主營產品:低壓伺服電機、交流伺服電機、步進電機、無刷電機以及配套驅動器。
南方大區:13482896782
北方大區:18017377875
廣東大區:13061929082
北方大區:18017377875
廣東大區:13061929082
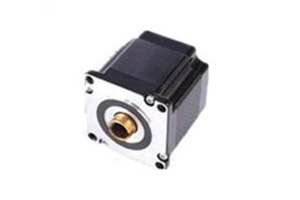
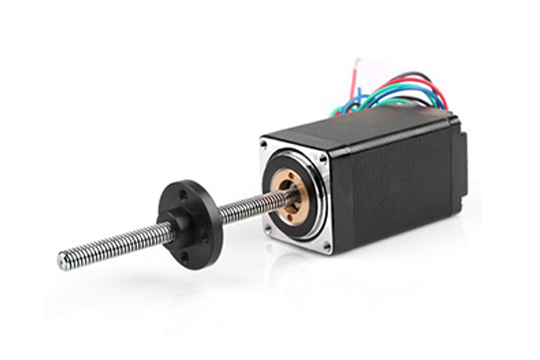
現在比較常用的步進電機包括反應式步進電機(VR)、永磁式步進電機(PM)、混合式步進電機(HB)和單相式步進電機等。永磁式步進電機 永磁式步進電機一般為兩相,轉矩和體積較小,步進角一般為7.5度 或15度;反應式步進電機 反應式步進電機一般為三相,可實現大轉矩輸出,步進角一般為1.5度,但噪聲和振動都很大。反應式步進電機的轉子磁路由軟磁材料制成,定子上有多相勵磁繞組,利用磁導的變化產生轉矩。混合式步進電機 混合式步進電機是指混合了永磁式和反應式的優點。它又分為兩相和五相:兩相步進角一般為1.8度而五相步進角一般為 0.72度。這種步進電機的應用最為廣泛。
一般步進電機的精度為步進角的百分之3-5,不累積。
1.當A相繞組通電(用直流電壓激磁)時;形成A相定子磁極(AA方向磁場),產生反應力,吸引轉子轉過一定的角度,使轉子齒與A相定子磁極小齒對齊。 2.當A相繞組斷電,B相繞組通電時,形成B相定子磁極(BB方向磁場) ,產生反應力,吸引轉子順時針轉過3°,使轉子齒與B相定子磁極小齒對齊。 3.以次類推………… 若控制線路不停地按A-B-C-A…順序控制步進電機各相繞組的通斷電,步進電機的轉子便不停地順時針轉動;若通電順序改為A-C-B-A…,步進電機的轉子將逆時針轉動。這種通電方式稱為三相三拍通電方式;此時定子繞組的通電狀態每改變一次,轉子轉過3°。 若控制線路不停地按A-AB-B-BC-C-CA-A…順序控制步進電機各相繞組的通斷電,這種通電方式稱為三相六拍通電方式。當從A相通電轉為A和B同時通電時,轉子齒將同時受到A相繞組產生的磁場和B相繞組產生的磁場的共同吸引,轉子齒只好停在A 和B兩相磁極之間,轉子轉過1.5°。當由A和B兩相同時通電轉為B相通電時,轉子再沿順時針方向旋轉1.5°,使轉子齒與B相磁極對齊。……依此類推。在三相六拍通電時,定子繞組的通電狀態每改變一次,轉子轉過1.5°。與三相三拍通電方式相比,可使每次轉角縮小一半。 步進電機定子繞組的通電狀態每改變一次,它的轉子轉過的一個確定角度,稱為步進電機的步距角a 。步距角a的計算公式: 其中,m為定子繞組的相數 ,Z為轉子的齒數,K為通電方式系數 ;當m相m拍通電時,k=1;m相2m拍通電時,k=2